# Mechanism
## Bill of Materials
### Servos
18 TowerPro [MG92B](http://www.towerpro.com.tw/product/mg92b/) are required.
> The dimension of 3d printed part is highly dependent on the servo's size. Modification is required if you want to use alternative servos.
### 3D-Printed Parts
#### Body x 1
| Filename | Thumbnail | Required |
| -------------- | ------------------------------------------------------------------ | -------- |
| body_top | 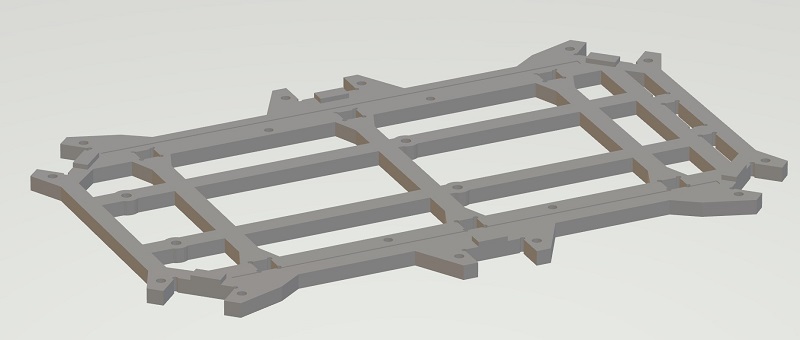 | 1 |
| body_bottom |
| 1 |
| body_bottom | 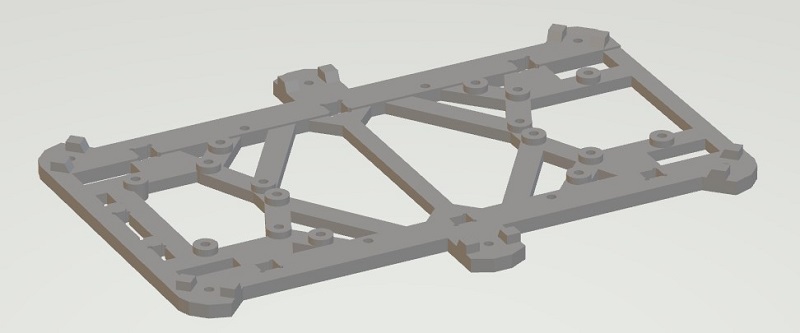 | 1 |
| body_side_wall |
| 1 |
| body_side_wall | 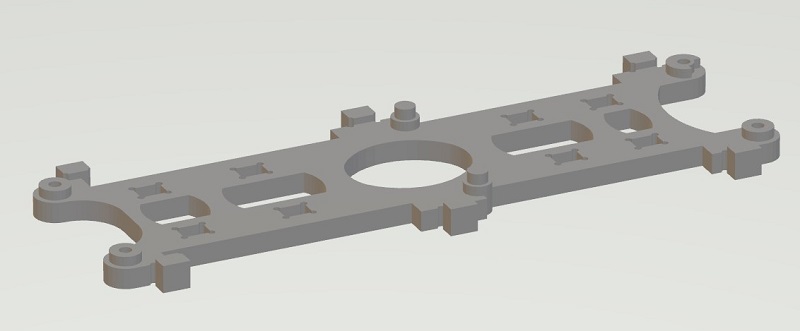 | 2 |
| body_back_wall |
| 2 |
| body_back_wall | 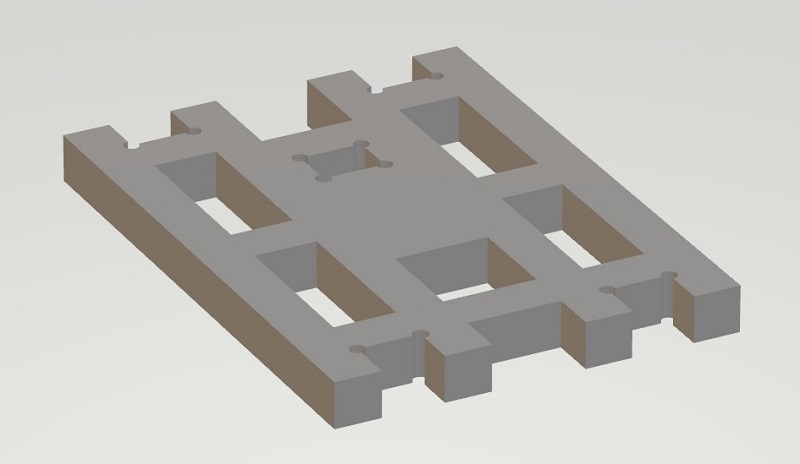 | 1 |
#### Leg x 6
| Filename | Thumbnail | Required |
| ------------ | ------------------------------------------------------------------- | -------- |
| thigh_top |
| 1 |
#### Leg x 6
| Filename | Thumbnail | Required |
| ------------ | ------------------------------------------------------------------- | -------- |
| thigh_top | 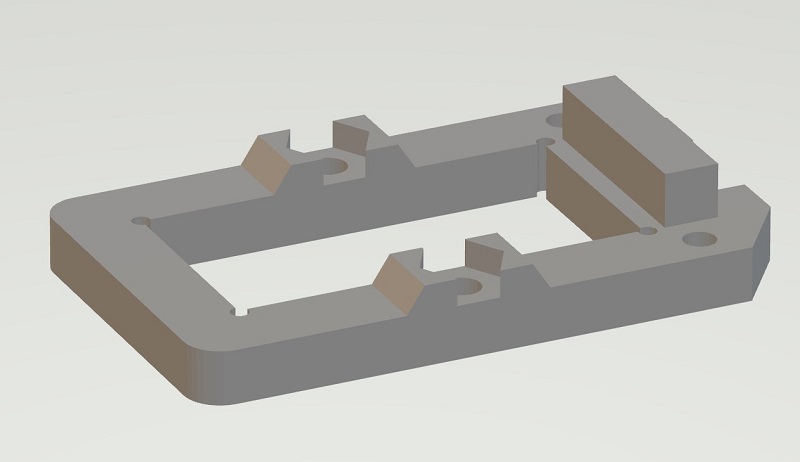 | 1 (x6) |
| thigh_bottom |
| 1 (x6) |
| thigh_bottom | 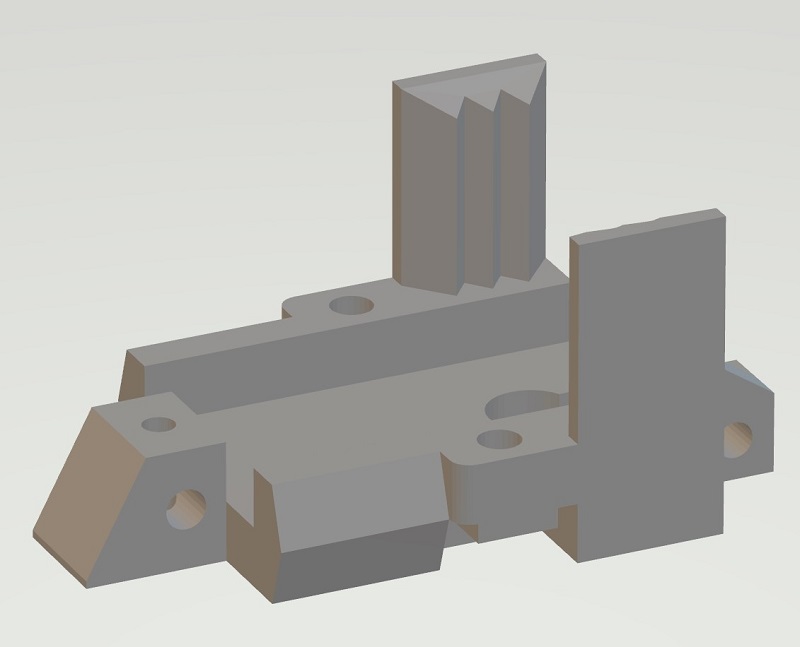 | 1 (x6) |
| joint_cross |
| 1 (x6) |
| joint_cross | 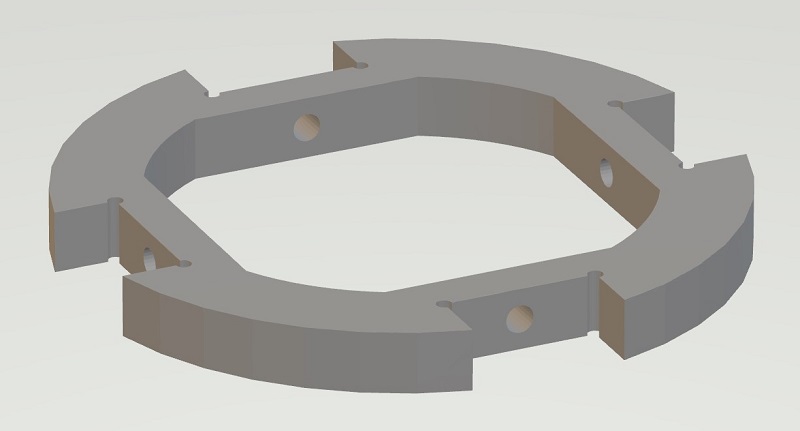 | 1 (x6) |
| joint_top |
| 1 (x6) |
| joint_top |  | 2 (x6) |
| joint_bottom |
| 2 (x6) |
| joint_bottom | 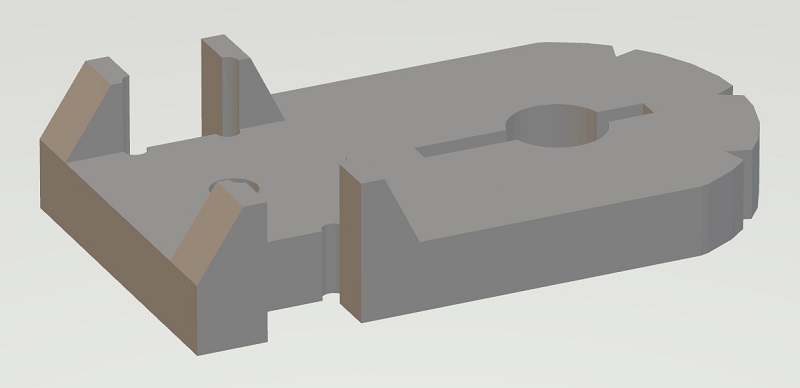 | 2 (x6) |
| leg_top |
| 2 (x6) |
| leg_top | 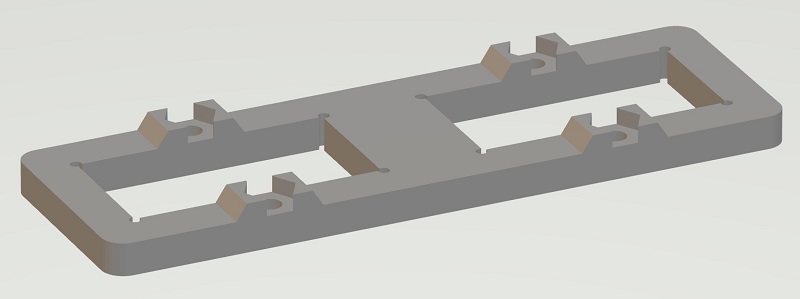 | 1 (x6) |
| let_bottom |
| 1 (x6) |
| let_bottom | 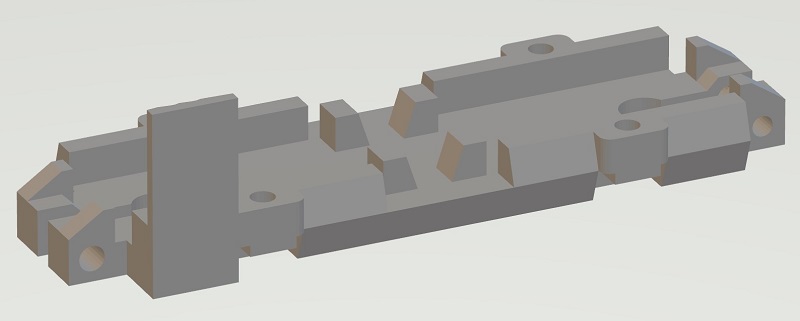 | 1 (x6) |
| foot_top |
| 1 (x6) |
| foot_top | 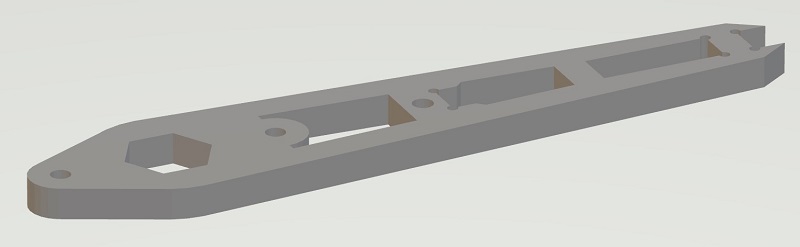 | 1 (x6) |
| foot_bottom |
| 1 (x6) |
| foot_bottom | 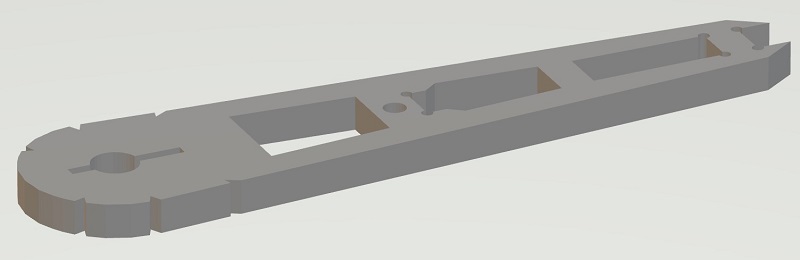 | 1 (x6) |
| foot_ground |
| 1 (x6) |
| foot_ground | 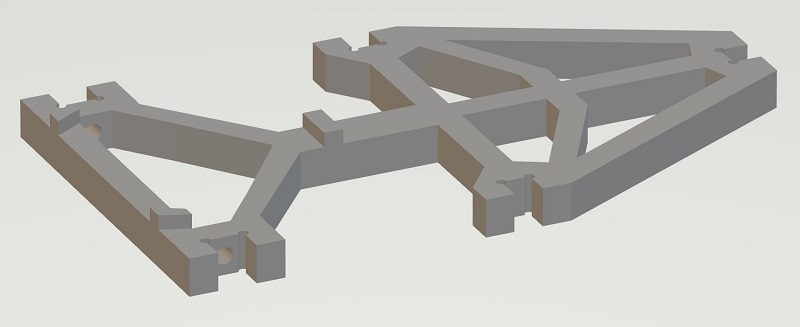 | 1 (x6) |
| foot_tip |
| 1 (x6) |
| foot_tip | 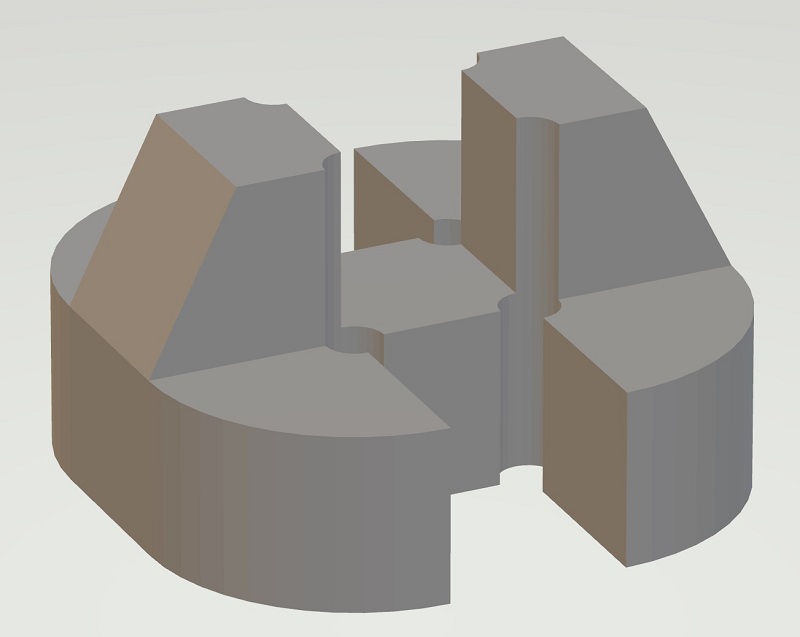 | 1 (x6) |
### Others
| Name | Spec | Thumbnail | Required | Note |
| --------- | ------- | ---------------------------- | -------- | ------------------------------------------------- |
| Screw | M2 6mm |  | 54 | Servo Arm: 1 x 18
| 1 (x6) |
### Others
| Name | Spec | Thumbnail | Required | Note |
| --------- | ------- | ---------------------------- | -------- | ------------------------------------------------- |
| Screw | M2 6mm |  | 54 | Servo Arm: 1 x 18
Joint: 4 x 6
Thigh: 2 x 6 |
| Screw | M2 10mm |  | 24 | Thigh: 1 x 6
Pin lock: 1 x 18 |
| Screw | M2 30mm |  | 36 | Servo: 2 x 18 |
| Nuts | M2 |  | 36 | Servo: 2 x 18 |
| Pin (304) | M4 6mm |  | 18 | Servo: 1 x 18 |
## Leg Assemble
### Assembly video
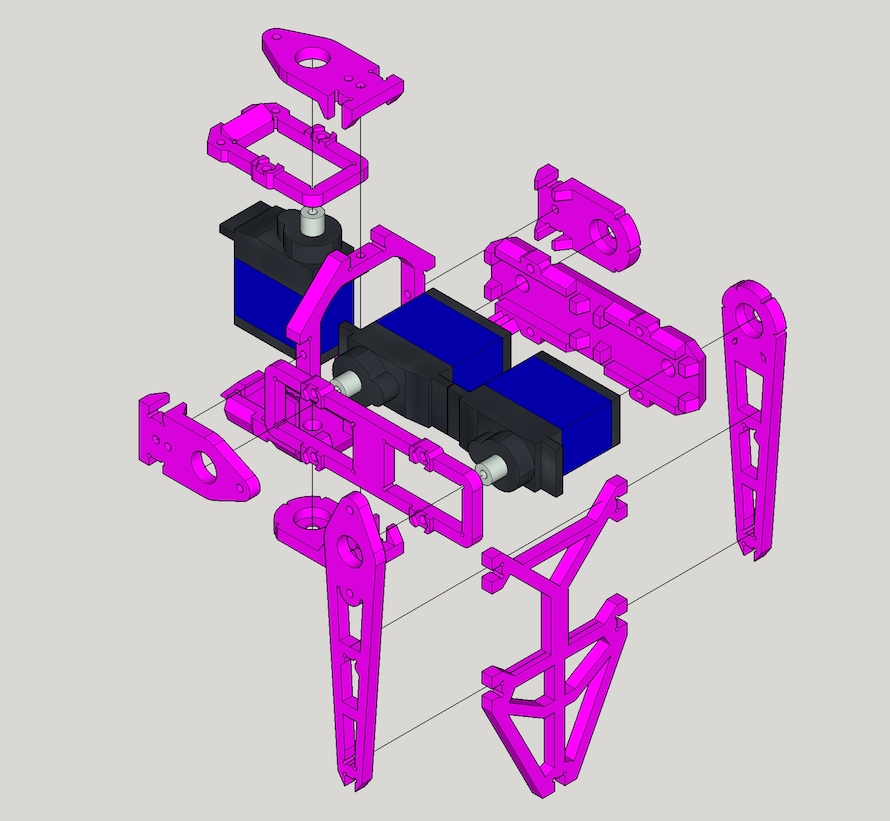
 ### Exploded view
### Exploded view
 ### Step 1
### Step 1
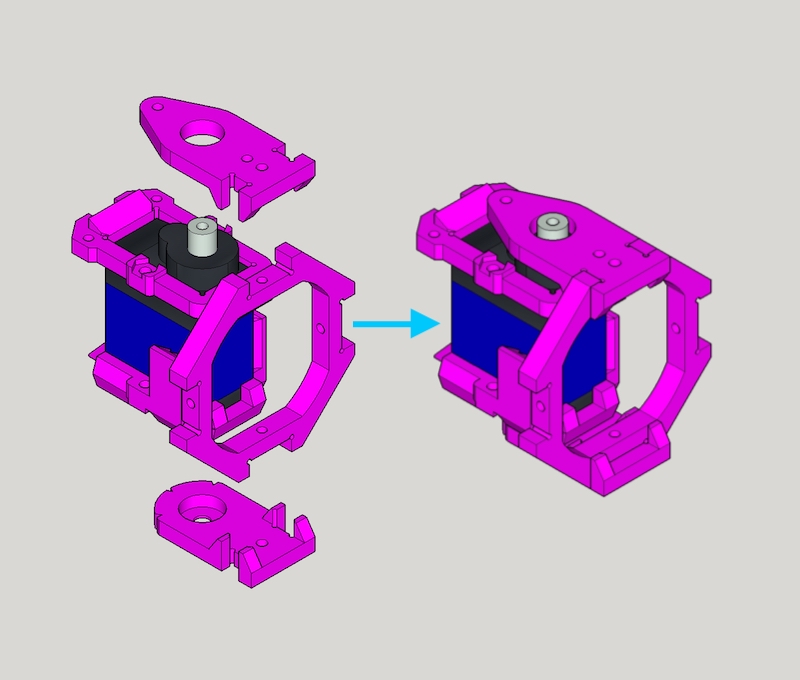
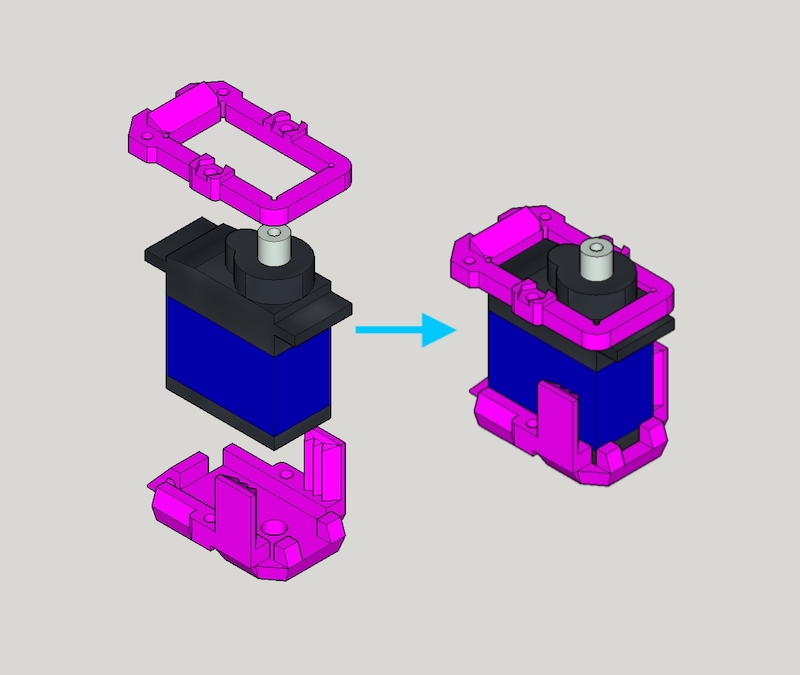 Combine `thigh_top`, `MG92B` and `thigh_bottom`, use M2x30mm screw and nut to secure them together.
### Step 2
Combine `thigh_top`, `MG92B` and `thigh_bottom`, use M2x30mm screw and nut to secure them together.
### Step 2
 Grab one `joint_cross`, `joint_top` and `joint_bottom` and combine them
### Step 3
Grab one `joint_cross`, `joint_top` and `joint_bottom` and combine them
### Step 3
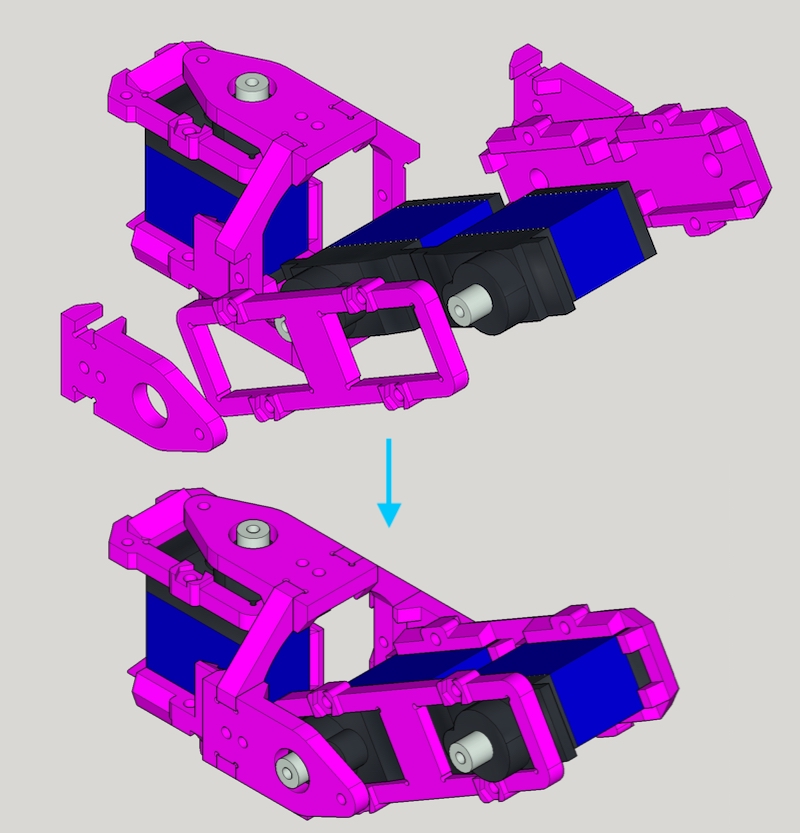 First put 2 x `MG92B`, `leg_top` and `leg_bottom` together with M2x30mm screw and nut.
Then attach `joint_top` and `joint_bottom` altogether
### Step 4
First put 2 x `MG92B`, `leg_top` and `leg_bottom` together with M2x30mm screw and nut.
Then attach `joint_top` and `joint_bottom` altogether
### Step 4
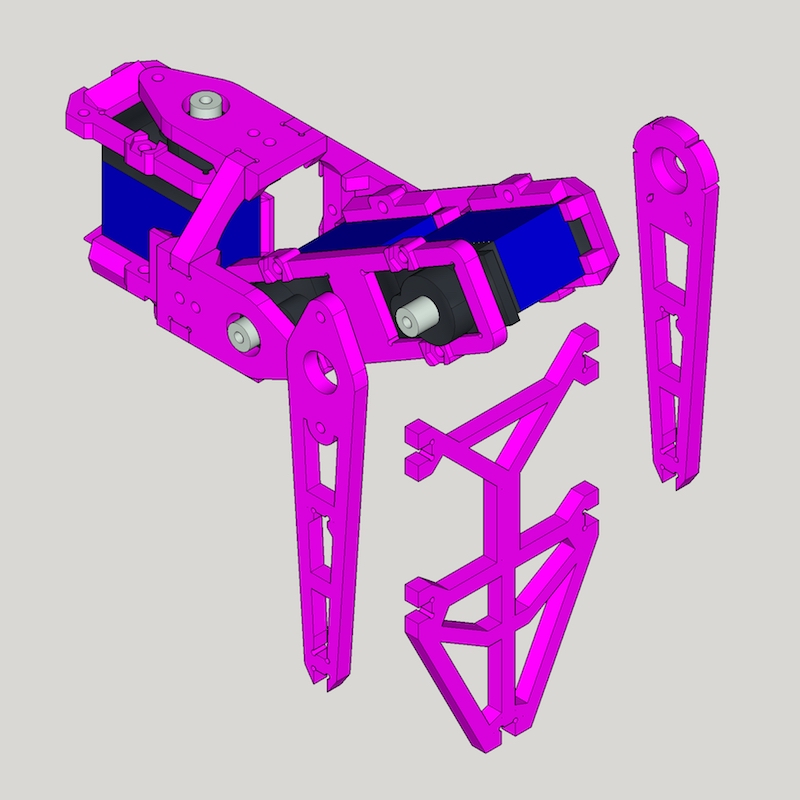 Grab `foot_top`, `foot_bottom` and `foot_ground` (and `foot_top`) and assemble them.
### Finish
Grab `foot_top`, `foot_bottom` and `foot_ground` (and `foot_top`) and assemble them.
### Finish
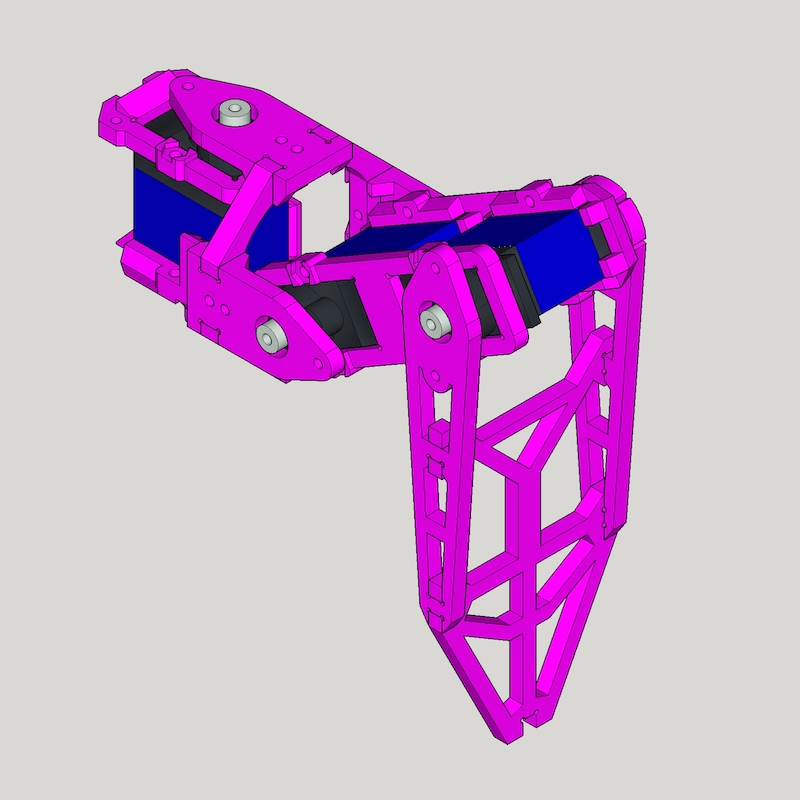 Great, you got 1 leg done, 5 more to go :)
Great, you got 1 leg done, 5 more to go :)