You cannot select more than 25 topics
Topics must start with a letter or number, can include dashes ('-') and can be up to 35 characters long.
1.6 KiB
1.6 KiB
Hexapod
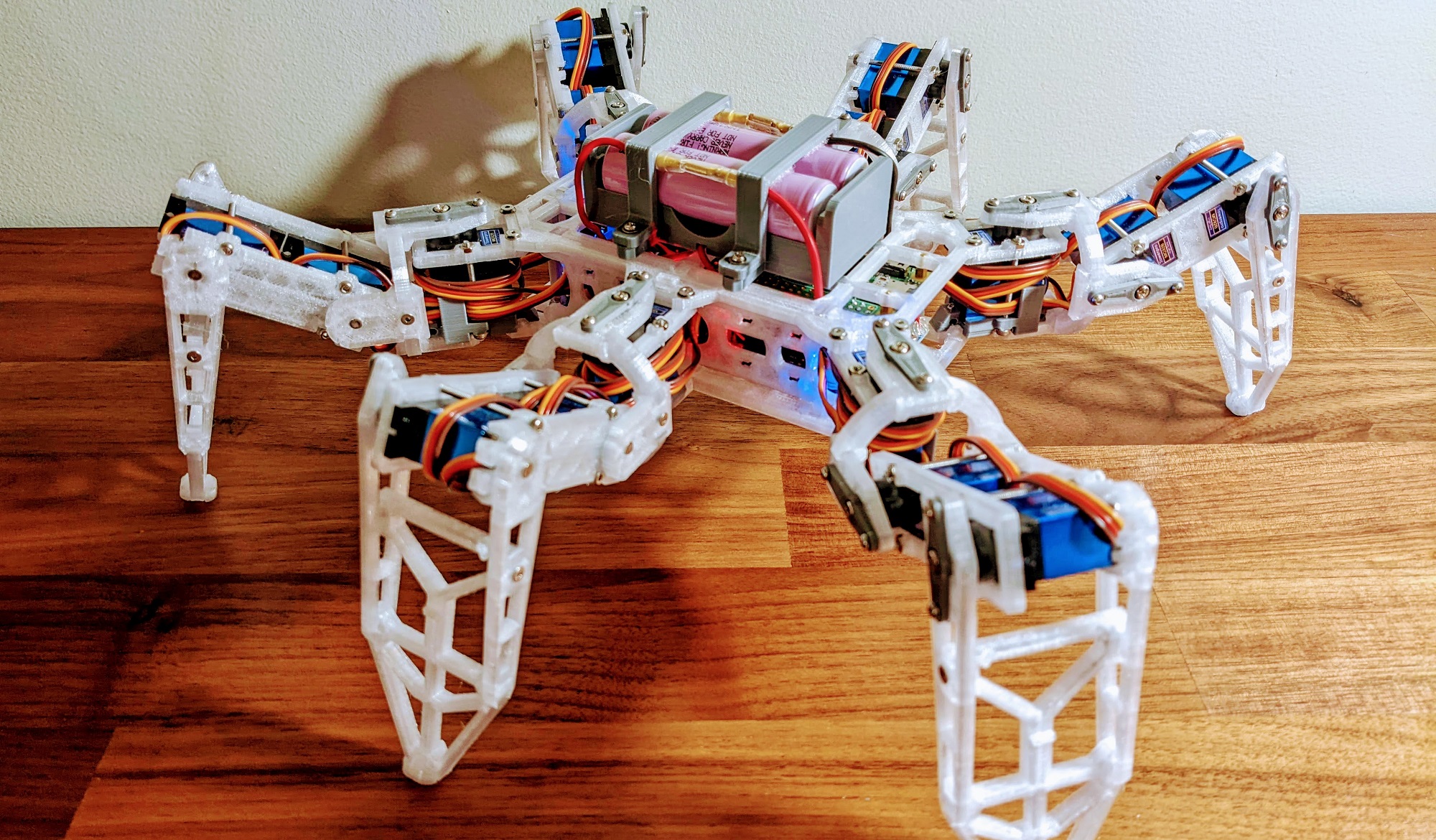
A Hexapod Robot using Raspberry Pi Zero W
You can use any mobile phone (iOS or Android) to control the movement of the hexapod (move forward, backward, etc.).
Brief introduction
- Remote control is done via
BLEofLinkit 7697 - It has 6 legs, each leg has 3 joints. So there are total
18Servo motors (TowerProMG92B) - Linkt 7697 dont have so many PWM control, so NXP
PCA9685x 2 are used to control these servo motors - Power comes from a
2S Lipo battery (7.4v). Also 7 xmini360 DC-DCstep down voltage regulator are used. One to provide5Vto Linkit 7697, The other six to provide6Vto each legs (1 mini360 serve 3 servo) - The body is 3D printed PLA. I use
Prusa i3 MK2S, a really good 3D printer. - Everything (3D STL, PCB schematic, 7697 source code) are included in the project under GPL license, Happy making!
Skill requirement
If you want to make one hexapod by yourself. You should at least knows how to:
- Mechanism part
- Use
3D printerto print a model. - Able to adjust 3D model to fit your custom need.
- Use
- Electronics
- Make a
PCB(suggest to use professional PCB services) - Soldering
SMDcomponent (0805 and TSSOP28) - How to use/charge/store
LIPO batteries
- Make a
- Software
- Use
Linkit 7697(ie. upload and run any program) - Use
LRemoteto communicate 7697 and your mobile phone
- Use
Table of Content
- Mechanism - How to build the body
- Electronics - Circuit explanation
- Software - The software running on Linkit 7697