2.9 KiB
Electronics
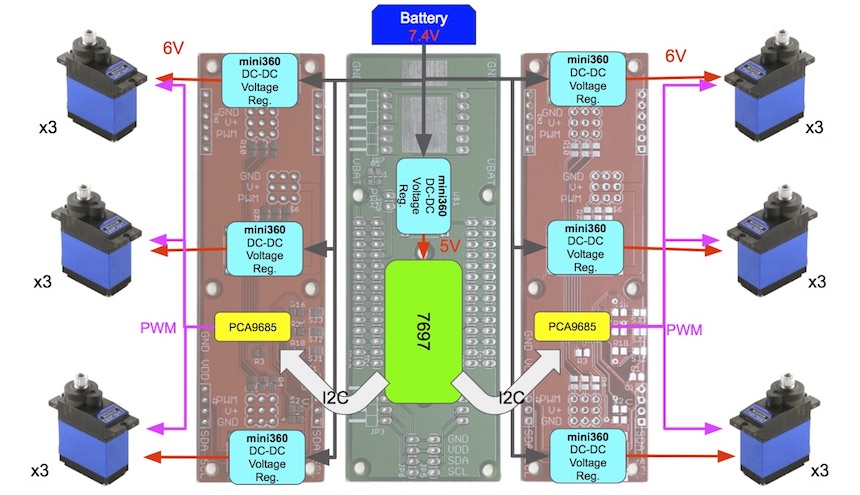
Connection Diagram
Bill of Materials (BOM)
PCB
| Name | Thumbnail | Required | Note |
|---|---|---|---|
| main |  |
1 | |
| sub |  |
2 | there is a difference (SJ1) between the 2 PCB, refer to below |
Components
| Name | Thumbnail | Required | Note |
|---|---|---|---|
| Linkit 7697 |  |
1 | |
| mini360 DC-DC Buck voltage regulator |  |
7 | adjust to 5V |
| PCA9685 (TSSOP28) |  |
2 | TSSOP28 |
| Resistor: 220 ohm (0805) | 18 | SMD | |
| Resistor: 10K ohm (0805) | 12 | SMD | |
| Resistor: 470 ohm (0805) | 1 | SMD | |
| LED: green or any color (0805) | 1 | SMD | |
| Capacitor: 10 uF (0805) | 2 | SMD | |
| 14 pin 2.54mm female header | 4 | ||
| 4 pin 2.54mm female header | 2 | ||
| 6 pin 2.54mm female header | 2 | ||
| 4 pin 2.54mm 90 degress male header | 2 | ||
| 6 pin 2.54mm 90 degress male header | 2 | ||
| 4 pin 2.54mm male header | 2 | ||
| 3 pin 2.54mm male header (black) | 6 | ||
| 3 pin 2.54mm male header (yellow) | 6 | ||
| 3 pin 2.54mm male header (red) | 6 | ||
| 2 pin 2.54mm male header | 1 | ||
| Jumper 2.54mm | 1 |
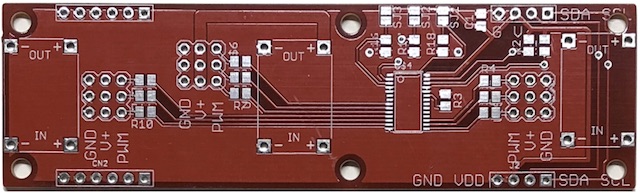
PCB detail
Software
Please use Eagle 7.7 software to open schematic files (main.sch/main.brd and sub.sch/sub.brd)
Eagle 7.7 can be found at http://eagle.autodesk.com/eagle/software-versions/1
Note.
7.7 is an old and free version of Eagle.
Latest Eagle is not free anymore unless you are students
Manufacture
There are a lot of online service that can manufacture PCB/PCBA for you (just google PCB/PCBA).
Seeed (https://www.seeedstudio.io/fusion_pcb.html) is one of them.
They also provide instructions of generating necessary Gerber files at http://support.seeedstudio.com/knowledgebase/articles/1176532-how-to-generate-gerber-file.
Main
main.brd/main.sch
Schematic
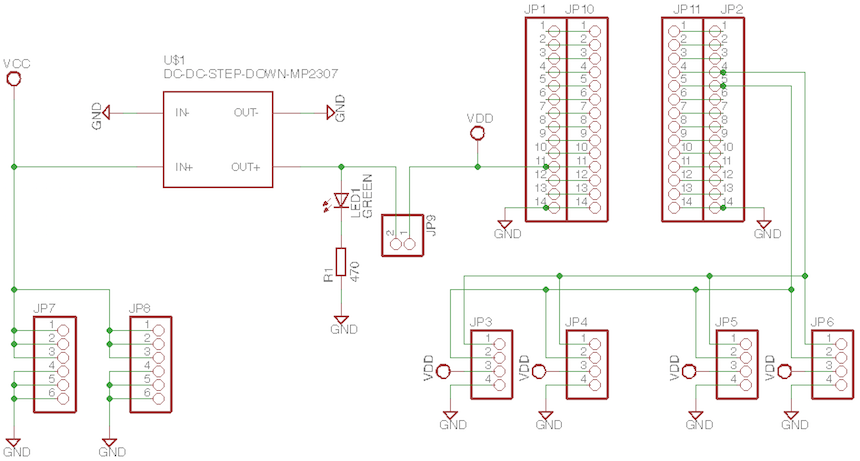
Note.
`MP2307` refer to mini360 DC-DC converter
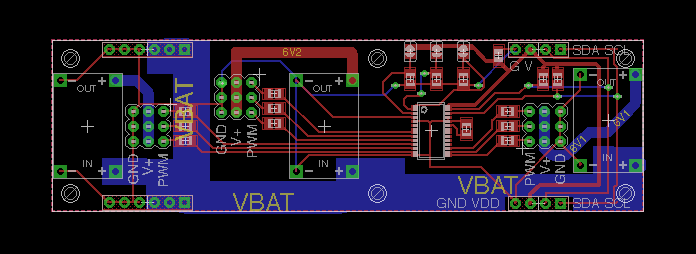
Layout
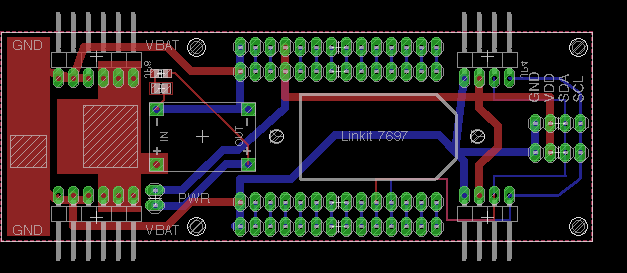
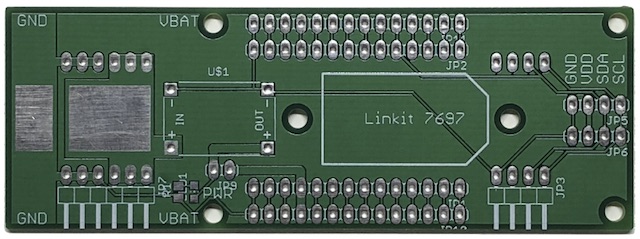
PCB
Sub (x2)
sub.brd/usb.sch
There is 1 difference between left and right PCB. The SJ1 of right PCB is left open, but
SJ1of left PCB should be closed. (This is i2c address setting of PCB9865)
Schematic
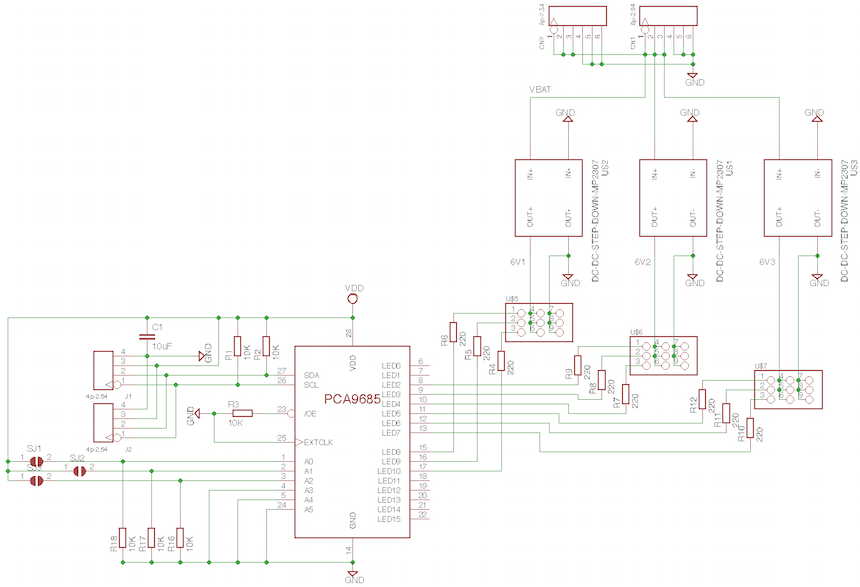
Note.
`MP2307` refer to mini360 DC-DC converter
Layout
PCB
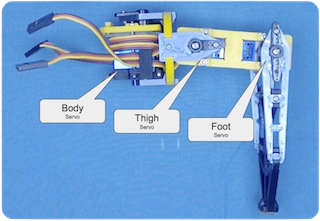
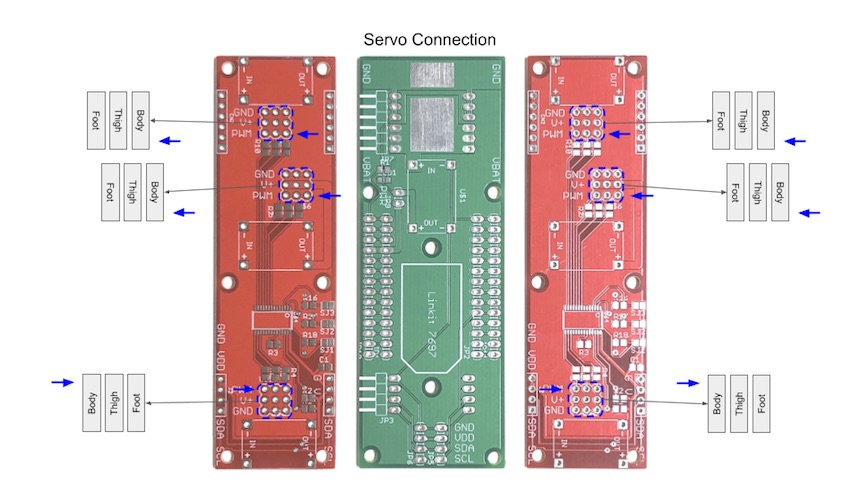
Servo Connection
Each leg of hexapod has 3 servos (body, thigh, foot), refer to below diagram for correct connection