4.2 KiB
 Hexapod
Hexapod
A Hexapod Robot using Raspberry Pi Zero W

Introduction
This is a hexapod robot based on Smallp Tsai's hexapod-v2-7697 project. This project reused most of the mechanism design in the original project, but with a totally redesign on the circuits and softwares. The table below shows the difference between this project and the original one.
| Original hexapod-v2-7697 | This project | |
|---|---|---|
| Controller | Linkit 7697 | Raspberry Pi Zero W or Raspberry Pi Zero W 2 |
| PWM control | Custom circuit board | 2 x PCA9685 motor driver boards |
| DC-DC | 7 x mini360 modules | 2 x XL4005 5A Max DC-DC modules and 1 x mini360 |
| Power | 2S Lipo battery | 2 x 18650 batteries |
| Remote | BLE | WiFi |
| Remote software | Android and iOS | PC, Android (WIP) |
Mechanism
Bill of Materials
Servo - MG92B
Servo is the key component. I use TowerPro MG92B. It has metal gear (important!). An hexapod requires 18 of them.
The dimension of 3d printed part is highly depended on servo's dimension. Modification is required if you want to use other alternative servo.
3D-Printed Parts
Body x 1
| Filename | Thumbnail | Required |
|---|---|---|
| body_top |  |
1 |
| body_bottom | 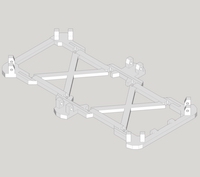 |
1 |
| body_center | 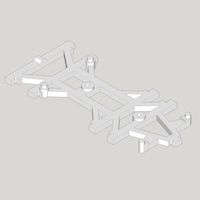 |
1 |
| body_side_wall | 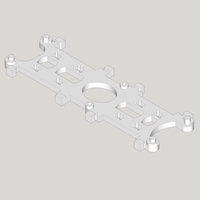 |
2 |
| body_back_wall | 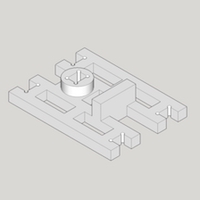 |
1 |
Leg x 6
| Filename | Thumbnail | Required |
|---|---|---|
| thigh_top | 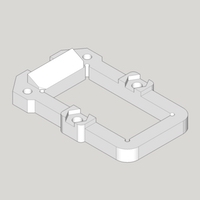 |
1 (x6) |
| thigh_bottom | 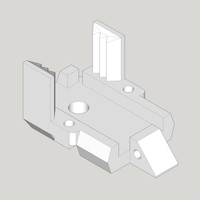 |
1 (x6) |
| joint_cross | 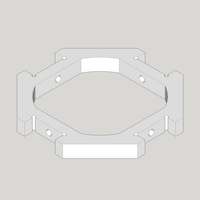 |
1 (x6) |
| joint_top | 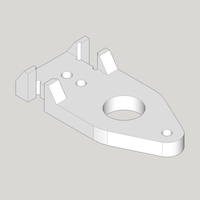 |
2 (x6) |
| joint_bottom |  |
2 (x6) |
| leg_top |  |
1 (x6) |
| let_bottom |  |
1 (x6) |
| foot_top |  |
1 (x6) |
| foot_bottom |  |
1 (x6) |
| foot_ground |  |
1 (x6) |
| foot_tip |  |
1 (x6) |
Others
| Name | Spec | Thumbnail | Required | Note |
|---|---|---|---|---|
| Screw | M2 6mm |  |
54 | Servo Arm: 1 x 18 Joint: 4 x 6 Thigh: 2 x 6 |
| Screw | M2 10mm |  |
24 | Thigh: 1 x 6 Pin lock: 1 x 18 |
| Screw | M2 30mm |  |
36 | Servo: 2 x 18 |
| Nuts | M2 |  |
36 | Servo: 2 x 18 |
| Pin (304) | M4 6mm |  |
18 | Servo: 1 x 18 |
Leg Assemble
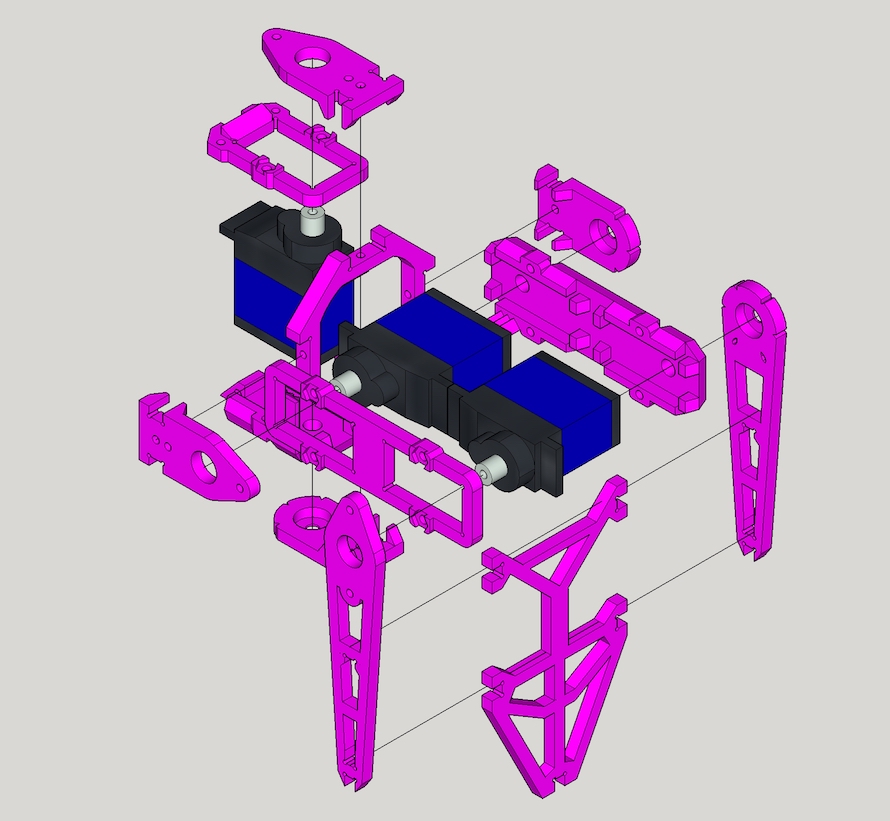
Please check Leg Assemble for more detail instructions
Leg assembly instruction video https://youtu.be/oaAE5fC09KQ is also available.

Note. Total 6 Legs are required.
Skill requirement
If you want to make one hexapod by yourself. You should at least knows how to:
- Mechanism part
- Use
3D printerto print a model. - Able to adjust 3D model to fit your custom need.
- Use
- Electronics
- Make a
PCB(suggest to use professional PCB services) - Soldering
SMDcomponent (0805 and TSSOP28) - How to use/charge/store
LIPO batteries
- Make a
- Software
- Use
Linkit 7697(ie. upload and run any program) - Use
LRemoteto communicate 7697 and your mobile phone
- Use
Table of Content
- Mechanism - How to build the body
- Electronics - Circuit explanation
- Software - The software running on Linkit 7697